FPN 톺아보기
FPN
(Feature Pyramid Networks)
- FPN Paper : Here
Object Detection 분야에 많이 적용되고 있는 Network
Abstract
feature pyramid는 다양한 스케일로 object detection 하기 위한 인식 시스템의 기본 구성 요소다. 하지만 object detector들은 pyramid로 표현하는 것을 피했다. 왜냐하면 부분적으로 계산하고 메모리가 집약적이기 때문이다. 이 논문에서는 pyramid 계층 구조를 활용해서 낮은 비용으로 feature pyramid를 구성 한다.
Introduction
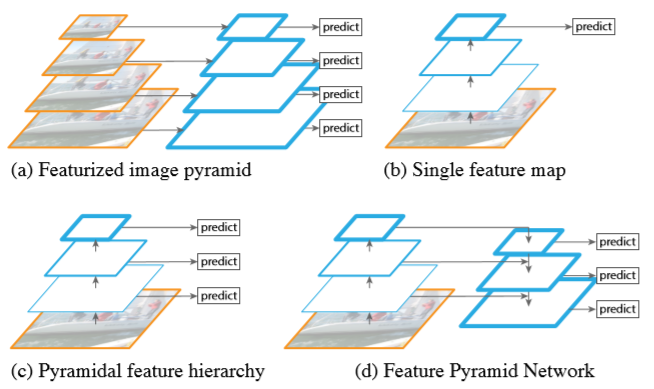
a) 이미지를 pyramid로 만들어 사용하여 feature pyramid 만들기
서로 다른 스케일로 물체를 인식하는 해결방법의 기초다. 이러한 속성을 사용하면 광범위한 범위에서 객체를 감지할 수 있다. 하지만 각 이미지 스케일에서 독립적으로 계산되므로 느리다.
b) 단일 스케일만 사용하도록 선택하는 방법
feature를 압축하는 방식이다. 하지만 pyramid를 사용하지 않고 압축시킨 feature만 사용하기 때문에 성능이 떨어진다. 그래서 이미지 pyramid 구조가 필요하지만 각 level을 특징짓는 것은 시간이 상당히 증가하기 때문에 실용적이지 않다.
c) convolution network로 계산된 feature pyramid 계층을 마치 특징화된 이미지 pyramid 인 것처럼 다시 사용하는 방법
d) FPN (b)와 (c)와 같이 빠르지만 강력하다.
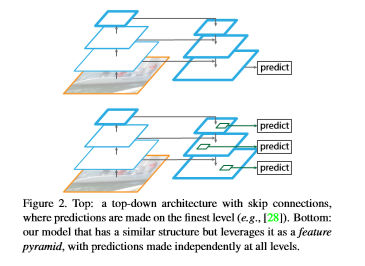
이 논문의 목표는 모든 규모에서 강한 feature pyramid를 만드는 것이다. 이 목표를 달성 하기 위해서 하향식 경로와 측면 연결을 통해 저해상도의 강력한 feature와 고해상도의 약한 feature를 결합한 구조를 사용한다.
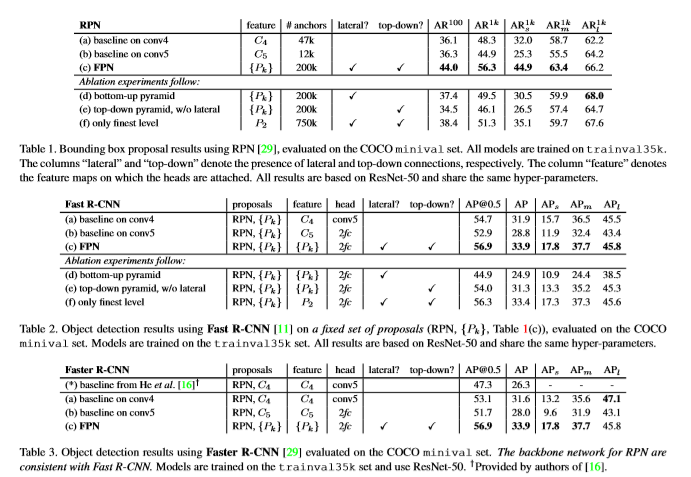
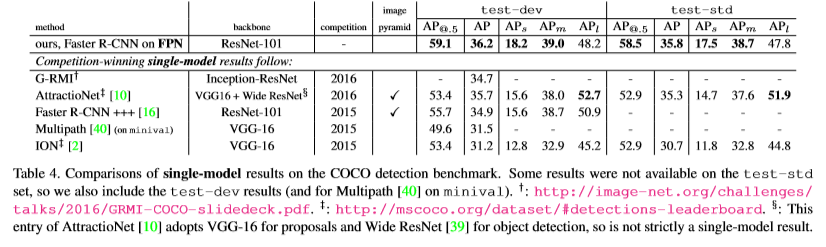
- 검출율 :
Average Recall(AR): 8.0 point (ex. 전체 암이 있는 사람 중 정확히 암진단을 받은 경우) - 정확도 :
COCO Average Precision(AP): 2.3 point ,PASCAL Average Precision(AP): 3.8 point (ex. 암진단 받은 사람 중 정확히 암진단을 받은 경우) - 시간이 늘어나지 않으면서 좋은 정확도를 가진다.
Feature Pyramid Networks
FPN의 목표는 낮은 수준에서 높은 수준으로 의미가 있는 convolution network로 계산된 feature pyramid 계층 구조를 활용해서 고성능 pyramid를 만드는 것이다.
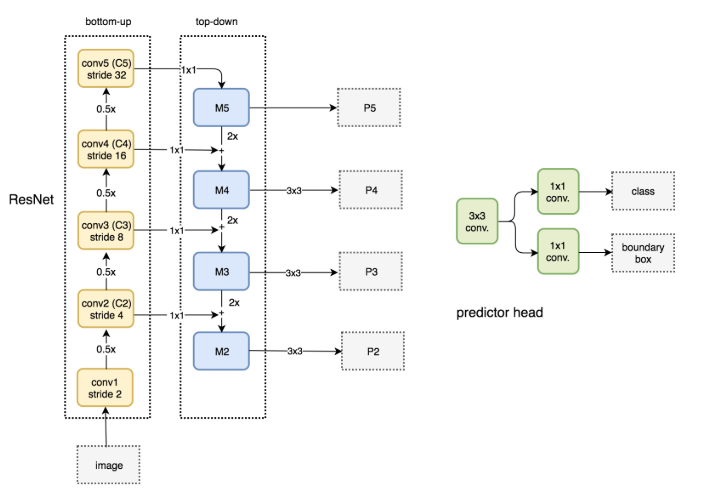
Bottom-up pathway
상향식 경로는 convolution network의 계산으로 여러 스케일의 feature map으로 구성된 feature 계층을 계산하고 스케일은 2배씩 증가한다.
feature pyramid의 경우 각 단계마다 하나의 pyramid level을 정의한다. 그리고 각 단계의 마지막 layer의 출력을 참조시킨다.
resnet에서는 마지막 residual block에서의 출력을 참조하며 메모리 공간 때문에 pyramid에 conv1을 포함시키지 않는다.
Top-down pathway and lateral connections
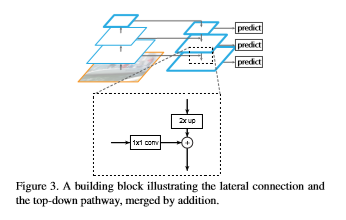
측면 연결은 상향식 경로와 하향식 경로에서 동일한 크기의 feature map을 병합한다.
하향식 경로에서 2배로 업 샘플링을 하고 해당 상향식 경로의 feature map과 병합한다. 채널의 크기를 줄이기 위해서 1x1 convolution layer를 거친다. 마지막으로 업 샘플링의 앨리어싱 효과를 줄이는 최종 feature map을 생성하기 위해서 3x3 convolution을 추가한다.
pyramid의 모든 level은 공유되는 classifiers와 regressors를 사용하기 때문에 feature의 차원을 256으로 설정한다.
Applications
이 논문에서는 Faster R-CNN에 FPN을 적용한다.
Feature Pyramid Networks for RPN
RPN은 원래 3x3 슬라이딩 윈도우에서 평가되어 오브젝트인지 아닌지 이진 분류하고 bounding box 회귀를 수행한다. 이것은 3x3 convolution layer와 분류/회귀를 위한 2개의 1x1 convolution으로 실현되고 이것을 network head라고 한다.anchor는 다양한 모양의 객체를 덮기 위해 미리 정의 된 여러 배율과 종횡비다.단일 스케일 feature map을 FPN으로 대체하여 RPN을 조정하면 feature pyramid의 각 level에 동일한 network head를 추가한다. 그리고 anchor를 각 level에 할당한다.({\(32^2,64^2,128^2,256^2,512^2\)}) 그리고 다중 종횡비 {\(1:2, 1:1, 2:1\)}을 각각 추가해서 총 15개의 anchor를 사용한다.
IOU 비율을 기준으로 anchor에 training labels를 할당한다. 공식적으로 anchor는 IOU가 0.7 이상이면 양수 0.3보다 낮으면 음수로 지정된다.
Feature Pyramid Networks for Fast R-CNN
Fast R-CNN은 ROI pooling을 사용하여 feature를 추출하는 영역 기반 object detector다. 그래서 FPN에 적용하기 위해서는 ROI를 \(Pk\)에 할당해야한다.
- \(P_k\) : pyramid level
- \(w,h\) : ROI의 width,height
- \(224\) : ImageNet pretraing size
- \(k_0\) : ROI가 매핑되어야 하는 목표 level(4로 설정)
여기서 직관적으로 예를 들어 ROI의 스케일이 줄어들면(224의 1/2) 해상도 level은 k=3에 매핑되어야한다.
Benchmark
Concept
읽으면서 찾아본 개념
ROI pooling
Fast R-CNN에 적용되는 개념으로 Fast R-CNN은 two-stage object detector다. pretraing된 모델로 feature map을 추출한뒤 RPN(Region proposal network)으로 분기가 나누어 진다. 그리고 RPN에서 추출된 제안된 영역과 feature map을 합친다. 이 합쳐지는 과정에서 각각의 제안된 영역의 크기가 각각 다르기 때문에 ROI pooling을 사용한다.
- 각각의 제안된 영역을 동일한 크기의 section으로 나눈다.
- 각 section마다 최대값을 찾아서 반환한다.
학습
- RPN으로 부터 얻은 제안된 영역(anchor), ground truth box :
cross entropy loss - 예측 box 좌표, 실제 box 좌표 :
smooth L1 loss
추론
RPN
- classification : object 인가 아닌가?(IOU)
- regression : x,y,w,h 값을 구하고 anchor에 적용시켜 최종 proposal을 얻는다.
ROI
- classification : 어떤 object 인가??
- regression : bounding box의 좌표를 조정한다.