Deep Sort 톺아보기
논문의 번역과 이해가 내가 느끼기엔 어렵고 복잡하기 때문에 소스코드를 분석해서 이해해보는 것이 나을거 같다.
- PAPER
- cosine metric learning : GitHub
- deep sort : GitHub
- 번역한 GitHub
이 포스트는 GitHub를 리뷰한 포스트 입니다.
DataSet
MARS와 MARKET 2개가 있었지만 MARS는 다운로드가 잘안되서.. MARKET으로만 하겠습니다.
실행
깃허브의 소스코드를 clone하면 간단하게 실행을 시켜볼 수 있다. 이건 간략하게 실행 부분만 가져온 것이고 자세하게 설치/실행하는 방법은 위에 깃허브의 Read.md를 읽어봐야한다.
학습
1
2
3
4
5
python train_market1501.py \
--dataset_dir=./Market-1501-v15.09.15/ \
--loss_mode=cosine-softmax \
--log_dir=./output/market1501/ \
--run_id=cosine-softmax
추적
1
python deep_sort_app.py --sequence_dir=./MOT16/test/MOT16-06 --detection_file=./resources/detections/MOT16_POI_test/MOT16-06.npy --min_confidence=0.3 --nn_budget=100 --display=True
개념
일단 코드를 살펴보기전에 Euclidean,Cosine Distance의 개념에 대해서 알고가야 매우 쉽게 할수 있다.
 원문 : https://cmry.github.io/notes/euclidean-v-cosine
원문 : https://cmry.github.io/notes/euclidean-v-cosine
Euclidean
우리가 눈으로 보며 줄자를 이용해 거리를 측정하는 것과 유사하다.
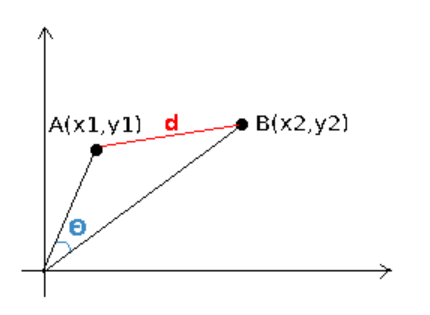
Cosine Distance
코사인 유사도는 무게와 크기는 고려하지않고 벡터사이의 각도만으로 측정한다.
코드
전부다 까면 오래 걸리고 사용할 수 있는 방법을 알아보기 위해 실질적이게 사용하는 부분과 간단한 개념만 볼것이다.
main
1
2
3
4
5
6
if __name__ == "__main__":
args = parse_args()
run(
args.sequence_dir, args.detection_file, args.output_file,
args.min_confidence, args.nms_max_overlap, args.min_detection_height,
args.max_cosine_distance, args.nn_budget, args.display)
run
이게 실질적으로 동작하는 예제 코드다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
def run(sequence_dir, detection_file, output_file, min_confidence,
nms_max_overlap, min_detection_height, max_cosine_distance,
nn_budget, display):
"""
multi-target tracker 실행
Parameters
----------
sequence_dir : str
시퀀스 데이터 경로
detection_file : str
검출 파일
output_file : str
output file 경로 / 추적 결과를 포함
min_confidence : float
confidence 임계값 / 이보다 낮은 confidence는 무시하게 된다.
nms_max_overlap: float
Maximum detection overlap (NMS 임계값)
min_detection_height : int
height 임계값 / 이보다 낮은 height는 무시하게 된다.
max_cosine_distance : float
cosine distance metric 임계값
nn_budget : Optional[int]
Maximum size of the appearance descriptor gallery. If None, no budget is enforced.
display : bool
True : 시각화
"""
# 시퀀스 정보수
seq_info = gather_sequence_info(sequence_dir, detection_file)
# cosine distance metric 사용
metric = nn_matching.NearestNeighborDistanceMetric(
"cosine", max_cosine_distance, nn_budget)
tracker = Tracker(metric)
results = []
# 프레임 마다 호출
def frame_callback(vis, frame_idx):
print("Processing frame %05d" % frame_idx)
# detection 생성
detections = create_detections(
seq_info["detections"], frame_idx, min_detection_height)
detections = [d for d in detections if d.confidence >= min_confidence]
# NMS 실행
boxes = np.array([d.tlwh for d in detections])
scores = np.array([d.confidence for d in detections])
indices = preprocessing.non_max_suppression(
boxes, nms_max_overlap, scores)
detections = [detections[i] for i in indices]
# tracker 업데이트 이 부분에서 detection을 업데이트 해서 객체를 추적한다.
# 내가 내 코드에 결합하고 싶을 때 사용하는 방법을 이해하기 위해 포스트를 작성했기 떄문에
# 자세하게 보고싶으면 SORT 포스트를 보자 비슷한거 같다.
tracker.predict()
tracker.update(detections)
# 시각화
if display:
image = cv2.imread(
seq_info["image_filenames"][frame_idx], cv2.IMREAD_COLOR)
vis.set_image(image.copy())
vis.draw_detections(detections)
vis.draw_trackers(tracker.tracks)
# 결과를 저장한다.
for track in tracker.tracks:
if not track.is_confirmed() or track.time_since_update > 1:
continue
bbox = track.to_tlwh()
results.append([
frame_idx, track.track_id, bbox[0], bbox[1], bbox[2], bbox[3]])
# 객체를 추적하는 시작부분 frame_callback을 매 프레임 호출한다.
if display:
visualizer = visualization.Visualization(seq_info, update_ms=5)
else:
visualizer = visualization.NoVisualization(seq_info)
visualizer.run(frame_callback)
# 결과를 저장한다.
f = open(output_file, 'w')
for row in results:
print('%d,%d,%.2f,%.2f,%.2f,%.2f,1,-1,-1,-1' % (
row[0], row[1], row[2], row[3], row[4], row[5]),file=f)
gather_sequence_info
시퀀스의 정보를 수집한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
def gather_sequence_info(sequence_dir, detection_file):
"""
시퀀스의 정보를 수집하는 함수
Parameters
----------
sequence_dir : str
MOTChallenge sequence directory 경로
detection_file : str
detection file 경로
Returns
-------
디렉토리의 시퀀스 정보:
* sequence_name: 시퀀스 이름
* image_filenames: 파일 이름
* detections: MOTChallenge 형식의 검출 파일
* groundtruth: MOTChallenge 형식의 groud-truth
* image_size: Image size (height, width).
* min_frame_idx: 첫번째 인덱스의 이름
* max_frame_idx: 마지막 인덱스의 이름
"""
# 이미지 경로
image_dir = os.path.join(sequence_dir, "img1")
# 파일이름
image_filenames = {
int(os.path.splitext(f)[0]): os.path.join(image_dir, f)
for f in os.listdir(image_dir)}
# 실제값
groundtruth_file = os.path.join(sequence_dir, "gt/gt.txt")
detections = None
# 검출 파일 불러오기
if detection_file is not None:
detections = np.load(detection_file)
groundtruth = None
# 실제값 불러오기
if os.path.exists(groundtruth_file):
groundtruth = np.loadtxt(groundtruth_file, delimiter=',')
# 시퀀스 이미지 읽기
if len(image_filenames) > 0:
image = cv2.imread(next(iter(image_filenames.values())),
cv2.IMREAD_GRAYSCALE)
image_size = image.shape
else:
image_size = None
# index
if len(image_filenames) > 0:
min_frame_idx = min(image_filenames.keys())
max_frame_idx = max(image_filenames.keys())
else:
min_frame_idx = int(detections[:, 0].min())
max_frame_idx = int(detections[:, 0].max())
# 시퀀스 정보
info_filename = os.path.join(sequence_dir, "seqinfo.ini")
if os.path.exists(info_filename):
with open(info_filename, "r") as f:
line_splits = [l.split('=') for l in f.read().splitlines()[1:]]
info_dict = dict(
s for s in line_splits if isinstance(s, list) and len(s) == 2)
update_ms = 1000 / int(info_dict["frameRate"])
else:
update_ms = None
feature_dim = detections.shape[1] - 10 if detections is not None else 0
seq_info = {
"sequence_name": os.path.basename(sequence_dir),
"image_filenames": image_filenames,
"detections": detections,
"groundtruth": groundtruth,
"image_size": image_size,
"min_frame_idx": min_frame_idx,
"max_frame_idx": max_frame_idx,
"feature_dim": feature_dim,
"update_ms": update_ms
}
return seq_info
cosine_distance
cosine distance를 이용해 반환을 하는 부분이다. deep sort는 cosine distance를 기준으로 만들어졌기에 cosine distance기준으로 본다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
def _cosine_distance(a, b, data_is_normalized=False):
if not data_is_normalized:
a = np.asarray(a) / np.linalg.norm(a, axis=1, keepdims=True)
b = np.asarray(b) / np.linalg.norm(b, axis=1, keepdims=True)
return 1. - np.dot(a, b.T)
def _nn_cosine_distance(x, y):
distances = _cosine_distance(x, y)
return distances.min(axis=0)
class NearestNeighborDistanceMetric(object):
"""
각 target에 대해 지금까지 관측된 샘플에 가장 가까운
거리를 반환하는 nearest neighbor distance metric
Parameters
----------
metric : "euclidean" , "cosine".
matching_threshold: 일치하는 임계값 / 거리가 더 크면 잘못된 것으로 탐지
budget : class당 샘플을 budget 이하로 수정 / 가장 오래된 샘플을 제거
Attributes
----------
samples : Dict[int -> List[ndarray]]
target id에서 지금까지 관찰된 샘플 목록으로 매핑
"""
def __init__(self, metric, matching_threshold, budget=None):
if metric == "euclidean":
self._metric = _nn_euclidean_distance
elif metric == "cosine":
self._metric = _nn_cosine_distance
else:
raise ValueError(
"Invalid metric; must be either 'euclidean' or 'cosine'")
self.matching_threshold = matching_threshold
self.budget = budget
self.samples = {}
def partial_fit(self, features, targets, active_targets):
"""Update the distance metric with new data.
Parameters
----------
features : ndarray
An NxM matrix of N features of dimensionality M.
targets : ndarray
An integer array of associated target identities.
active_targets : List[int]
A list of targets that are currently present in the scene.
"""
for feature, target in zip(features, targets):
self.samples.setdefault(target, []).append(feature)
if self.budget is not None:
self.samples[target] = self.samples[target][-self.budget:]
self.samples = {k: self.samples[k] for k in active_targets}
def distance(self, features, targets):
"""Compute distance between features and targets.
Parameters
----------
features : ndarray
An NxM matrix of N features of dimensionality M.
targets : List[int]
A list of targets to match the given `features` against.
Returns
-------
ndarray
Returns a cost matrix of shape len(targets), len(features), where
element (i, j) contains the closest squared distance between
`targets[i]` and `features[j]`.
"""
cost_matrix = np.zeros((len(targets), len(features)))
for i, target in enumerate(targets):
cost_matrix[i, :] = self._metric(self.samples[target], features)
return cost_matrix
deep sort에서는 객체의 위치와 그 다음 프레임에서 객체의 위치를 찾기 위해 cosine similarity를 사용하는 것으로 추정된다. 엄청난 수식이지만 일단 풀어보진 않고 이렇다만 알아두고 넘어가야 할거 같다..
create_detections
detection 파일을 이용해 주어진 프레임에 대해서 detectio list를 만든다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
def create_detections(detection_mat, frame_idx, min_height=0):
"""
주어진 프레임에 대한 detection을 만들기
Parameters
----------
detection_mat : ndarray
detection matric은 처음 10개 열은 MOTChallenge 형식이고
나머지 열은 각 detection과 연관된 벡터가 저장된다.
frame_idx : int
프레임 인덱스
min_height : Optional[int]
최소 bounding box 높이 / 이것보다 작으면 무시한다.
Returns
-------
List[tracker.Detection]
detection 반환
"""
frame_indices = detection_mat[:, 0].astype(np.int)
mask = frame_indices == frame_idx
detection_list = []
# detection parsing
for row in detection_mat[mask]:
bbox, confidence, feature = row[2:6], row[6], row[10:]
if bbox[3] < min_height:
continue
detection_list.append(Detection(bbox, confidence, feature))
return detection_list
NMS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
def non_max_suppression(boxes, max_bbox_overlap, scores=None):
"""
Parameters
----------
boxes : ndarray
ROI 배열 (x, y, width, height).
max_bbox_overlap : float
이 값보다 겹치는 ROI는 억제된다.
scores : Optional[array_like]
confidence 점수
Returns
-------
List[int]
NMS 반환
"""
if len(boxes) == 0:
return []
boxes = boxes.astype(np.float)
pick = []
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2] + boxes[:, 0]
y2 = boxes[:, 3] + boxes[:, 1]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
if scores is not None:
idxs = np.argsort(scores)
else:
idxs = np.argsort(y2)
while len(idxs) > 0:
last = len(idxs) - 1
i = idxs[last]
pick.append(i)
xx1 = np.maximum(x1[i], x1[idxs[:last]])
yy1 = np.maximum(y1[i], y1[idxs[:last]])
xx2 = np.minimum(x2[i], x2[idxs[:last]])
yy2 = np.minimum(y2[i], y2[idxs[:last]])
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
overlap = (w * h) / area[idxs[:last]]
idxs = np.delete(
idxs, np.concatenate(
([last], np.where(overlap > max_bbox_overlap)[0])))
return pick